Capabilities
Precision that adapts.
Navigation that endures.
Our navigation stack is software-defined and hardware-agnostic. Each capability is modular and designed to work as one to radically enhance the precision of navigation in challenging environments.
QuGIVE
Market gap
The performance gap between expensive, tactical-grade INS systems and low-cost, automotive-grade MEMS IMUs. Automotive OEMs need high-performance dead-reckoning but are constrained by automotive cost targets.
QuNav's solution
QuGIVE's advanced tight-coupling algorithms bridge this gap, extracting maximum performance from low-cost hardware and delivering reliable navigation in urban canyons and tunnels where others fail.
Key features
- Integration of consumer-grade GNSS and consumer-grade MEMS inertial sensors
- Sensor-agnostic software that can be customized to fit different hardware platforms
- Tight coupling of carrier phase GNSS with inertial measurements and vehicle motion model
- Cm-accurate (RTK) positioning capability
- Reliable and consistent navigation performance (position, velocity and attitude) in GNSS-challenged and denied environments (urban canyons, tunnels and parking garages)

Learn more

QuGIVE
Test environments and example automotive tests
Real-time software was tested in a variety of GNSS degraded and GNSS-denied environments.



QuGIVE enables consistent navigation performance in harsh GNSS environments.
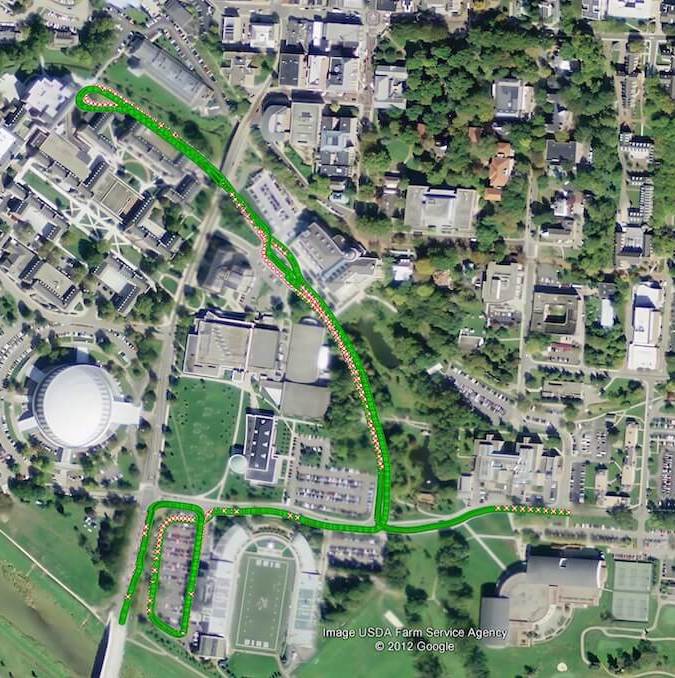
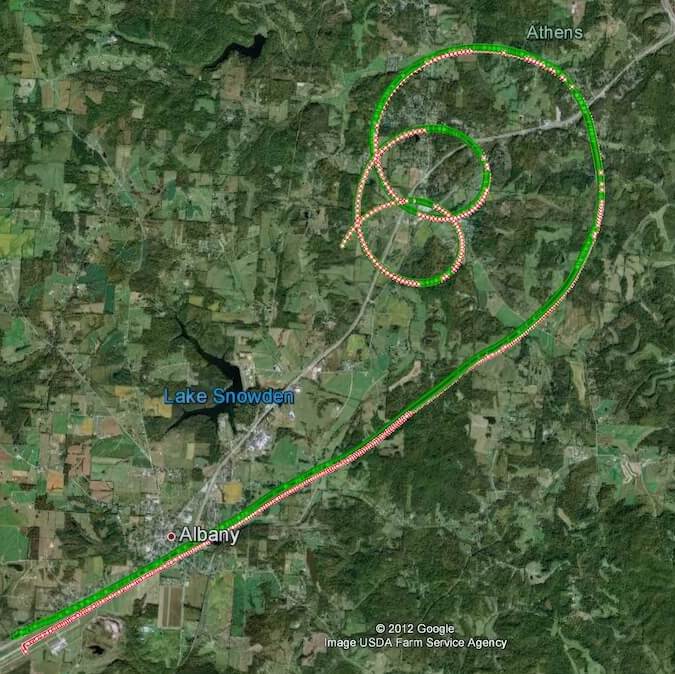
Real-time performance in harsh GNSS environments

Urban Canyons
San Francisco
Urban Canyons, tunnels
Chicago
5 minutes of complete GNSS outage
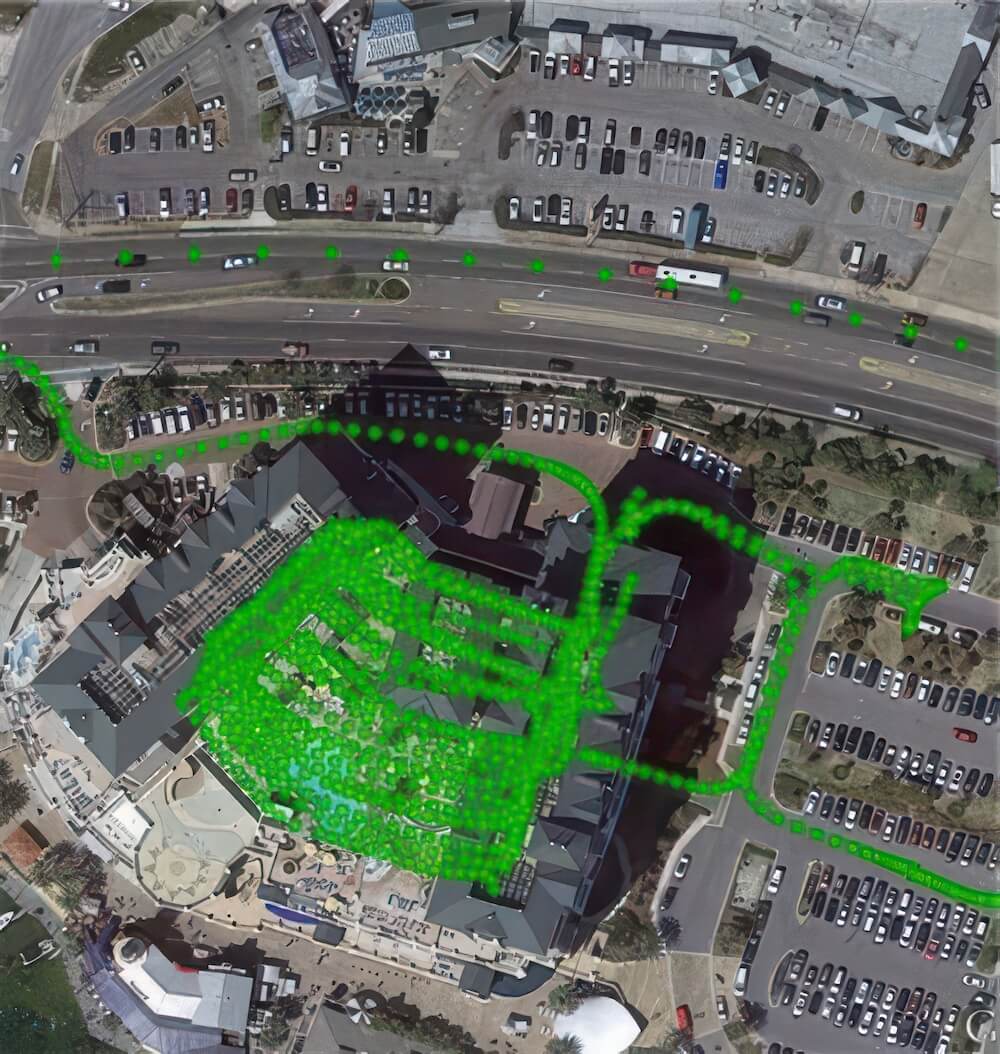
Parking garages
QuCore

Market gap
The critical security vulnerability of millions of deployed GNSS receivers that lack protection against spoofing. The only available solutions typically require a complete hardware replacement.
QuNav's solution
QuCore offers a low-cost, high-impact firmware-only path to spoofing immunity for existing hardware. Its 1-Hz tracking bandwidth makes it practically immune to spoofing attacks, and its 20-dB processing gain provides a secondary benefit of improved performance in weak signal environments.
Key features
QuCore technology brings major improvements to satellite navigation systems by combining GNSS and inertial sensor data in a smarter, deeper way than traditional methods.
Deep Sensor Fusion
Unlike traditional systems that combine GNSS and inertial data after initial signal processing, QuCore blends them much earlier - at the signal-processing level.
Learn more
QuCore
How it works
- Mutual aiding between GNSS and inertial at the signal processing level
- Improved robustness of GNSS signal processing resulting from Long Coherent Integration (1 second)
Key benefits:
- Weak signal recovery and jamming mitigation 20-dB gain in GNSS signal processing
- Elimination of spoofing: 1-Hz tracking bandwidth makes the signal processing practically immune to spoofing attacks

QuCore can be software-injected into receiver modules as a firmware upgrade.
QuCore
Weak signal recovery and spoofing mitigation

UAV test with consumer-grade MEMS IMU
Recovery of weak GPS signals:
40 dB attenuation by broadband noise

Sub-meter accurate positioning is demonstrated under
40 dB(10,000x) signal attenuation of open-sky GPS signals
Test scenario: Live sky GPS with software injection of spoofingQuCore can be software-injected into receiver modules as a firmware upgrade.
Unprotected receiver output is pushed to a wrong location.
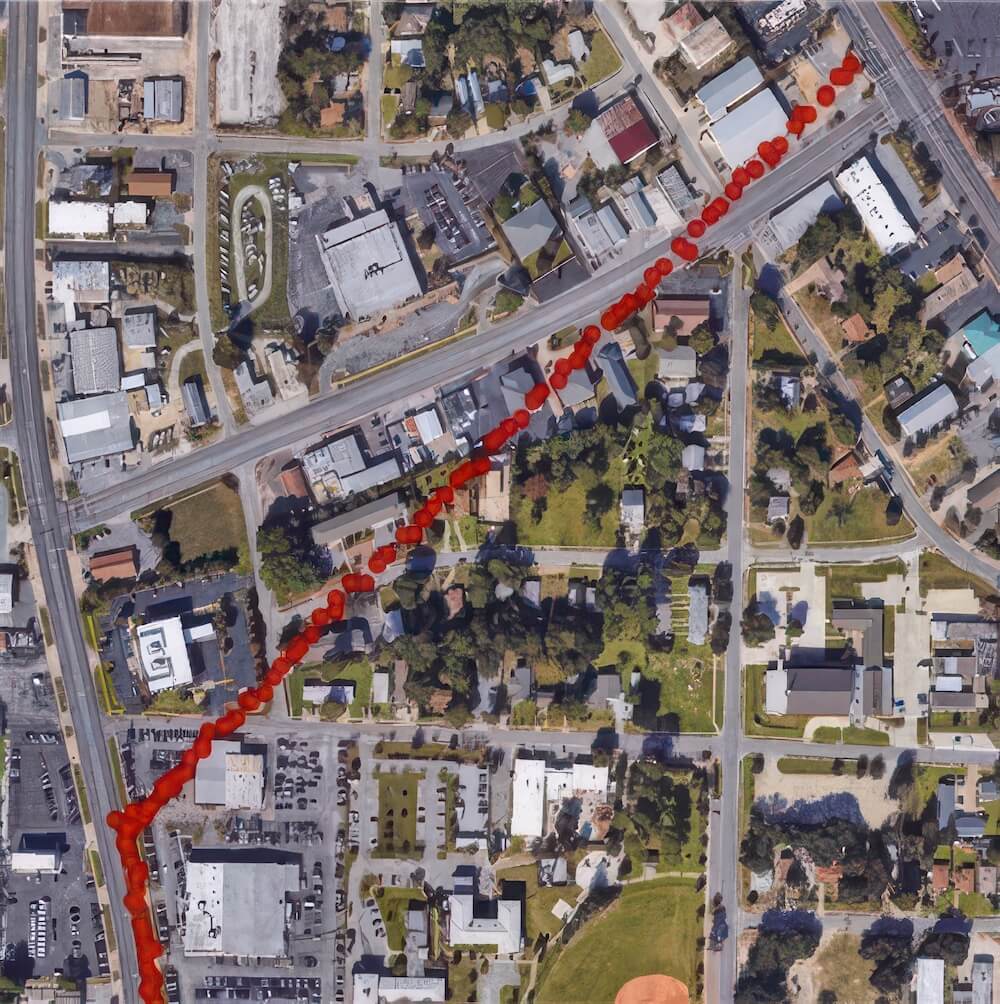
QuCore solution follows the actual path.
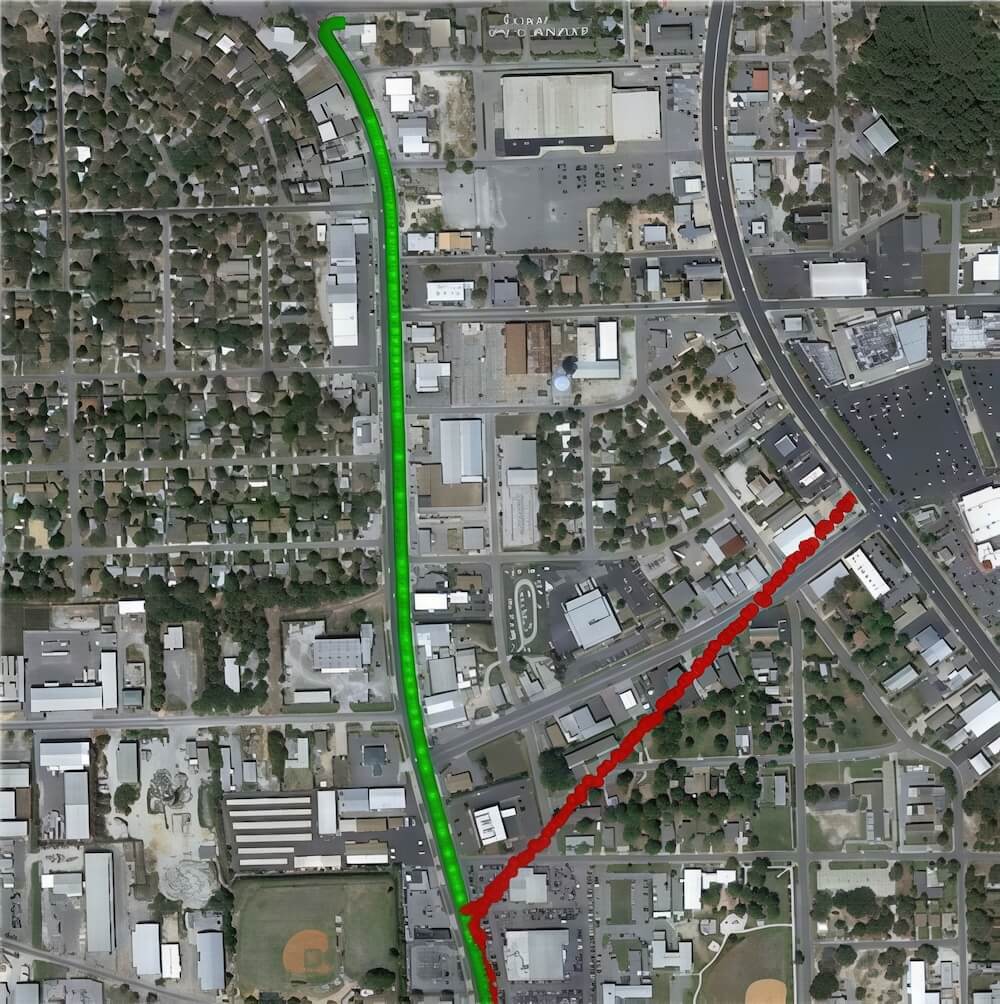
QuCore protects GNSS against spoofing attacks.
QuShield
Market gap
The need for the highest level of anti-jamming and anti-spoofing protection in new designs for defense and critical infrastructure. Hardware partners may lack the specialized IP to develop their own CRPA processing solutions.
QuNav's solution
QuShield provides a modern, software-defined CRPA processing engine that competes head-to-head with the best solutions, offering partners a ready-made, best-in-class resilience solution.
Key features
Protecting GNSS signals from jamming and spoofing using multi-element antennas and cascaded beam-forming.
- Pre-correlation jamming mitigation
- Post-correlation spoofing mitigation
The dual-layered defense allows QuShield to handle even sophisticated attacks that combine jamming and spoofing, keeping GNSS-based systems accurate, reliable, and secure.
Learn more
QuShield
How it works
QuShield implements a cascaded architecture to simultaneously protect GNSS signals against jamming and spoofing attacks.
- Pre-correlation mitigation of jamming: Estimation of jamming signals’ directions and subsequent mitigation via null-space projection
- Post-correlation mitigation of spoofing: Beam forming and signal tracking

Instead of combining all antenna signals into one stream, QuShield projects them into the jamming nullspace, eliminating jamming while preserving the spatial data to eliminate spoofing.

QuShield
Technology validation
QuShield protects GNSS against jamming and spoofing, including the most challenging cases of combined attacks.
Example live-sky test: Reliable GNSS-based positioning under jamming and spoofing

QuBlend

Market gap
The high cost, long development time, and significant R&D risk associated with integrating new and diverse sensor types (vision, LiDAR, radar, etc.) into a navigation system.
QuNav's solution
QuBlend acts as a universal sensor abstraction layer. Its object-oriented, "building block" architecture de-risks development for hardware integrators, allowing them to rapidly test and deploy new sensors without redesigning their core fusion software.
Key features
QuBlend is a true plug-and-play navigation software that automatically adapts whenever you add or remove sensors – no redesigns, no extra coding required.
Why this matters
- You can quickly upgrade to better or cheaper sensors as they become available
- The same software can work across different platforms - cars, drones, and more
- You can easily test how new sensors affect navigation performance during development
Learn more
QuBlend
How it works
QuBlend uses smart software architecture where every type of sensor (cameras, inertial sensors, lidars , etc.) is represented by a flexible "building block".
- Instead of designing the system for each specific sensor, we define them by the type of measurements they provide
- The plug-and-play software is abstracted for generic sensors that are grouped into classes according to the type of their measurements

QuBlend
Validation and testing
QuBlend was extensively tested under the DARPA All Source Positioning and Navigation (ASPN) program.
- 22 test scenarios: flight, ground vehicles, pedestrian
- 64 different sensors: IMUs (consumer, tactical and nav grade), GNSS, cameras, lidars, magnetometers, etc.
- Test results demonstrate the true plug-and-play software functionality for various sensor configurations and operational scenario.
Ground vehicle
Sensors:
- IMU
- Camera
- Lidar
- Magnometer
In-flight
Sensors:
- IMU
- Camera
- RFID
Indoor

Sensors:
- IMU
- Camera
- Baro-altimer
GNSS-denied test examples
QuGate
Market gap
The unreliability of raw sensor data in the real world. GNSS signals are corrupted by multipath in cities, and vision systems produce outliers. A fusion engine is only as good as the data it receives.
QuNav's solution
QuGate is the crucial "garbage filter" that makes sensor fusion robust. Its layered approach of statistical gating and adaptive de-weighting ensures that the fusion engine is fed only high-integrity data, dramatically improving the reliability of the final position output.
Key features
QuGate technology enables consistent and reliable sensor-fusion under challenging environments by mitigating measurement outliers.
Example applications
- Mitigation of GNSS multipath errors in dense urban environments
- Mitigation of outliers in vision measurements

Learn more
QuGate
How it works
A layered approach to outlier mitigation
- Statistical gating: INS is applied to predict what aiding measurements should look like. These predictions are then compared with the actual data, and any measurements that do not match are filtered out.
-
- Adaptive de-weighting: Probabilistic Data Association Filter (PDAF) handles any bad data that still slips through. PDAF enhances the standard Kalman filter by factoring in the likelihood that certain measurement errors could still be present
-

QuGate
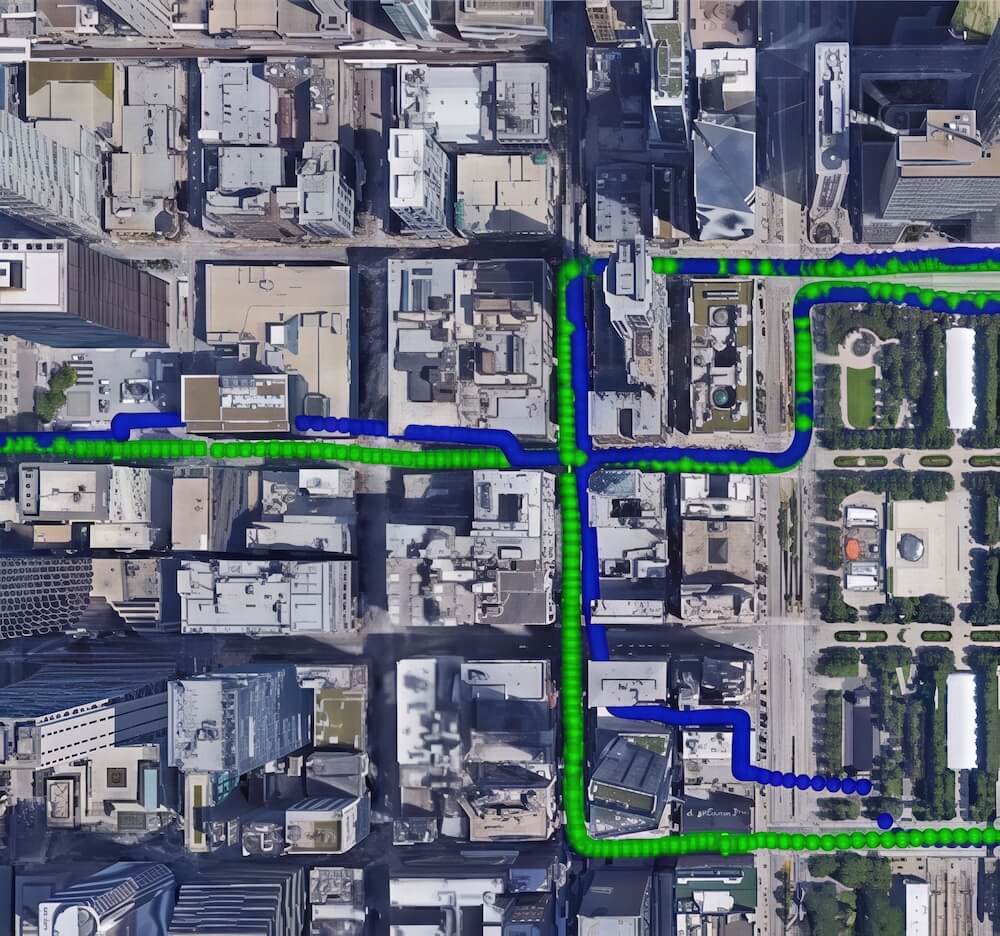
Example applications
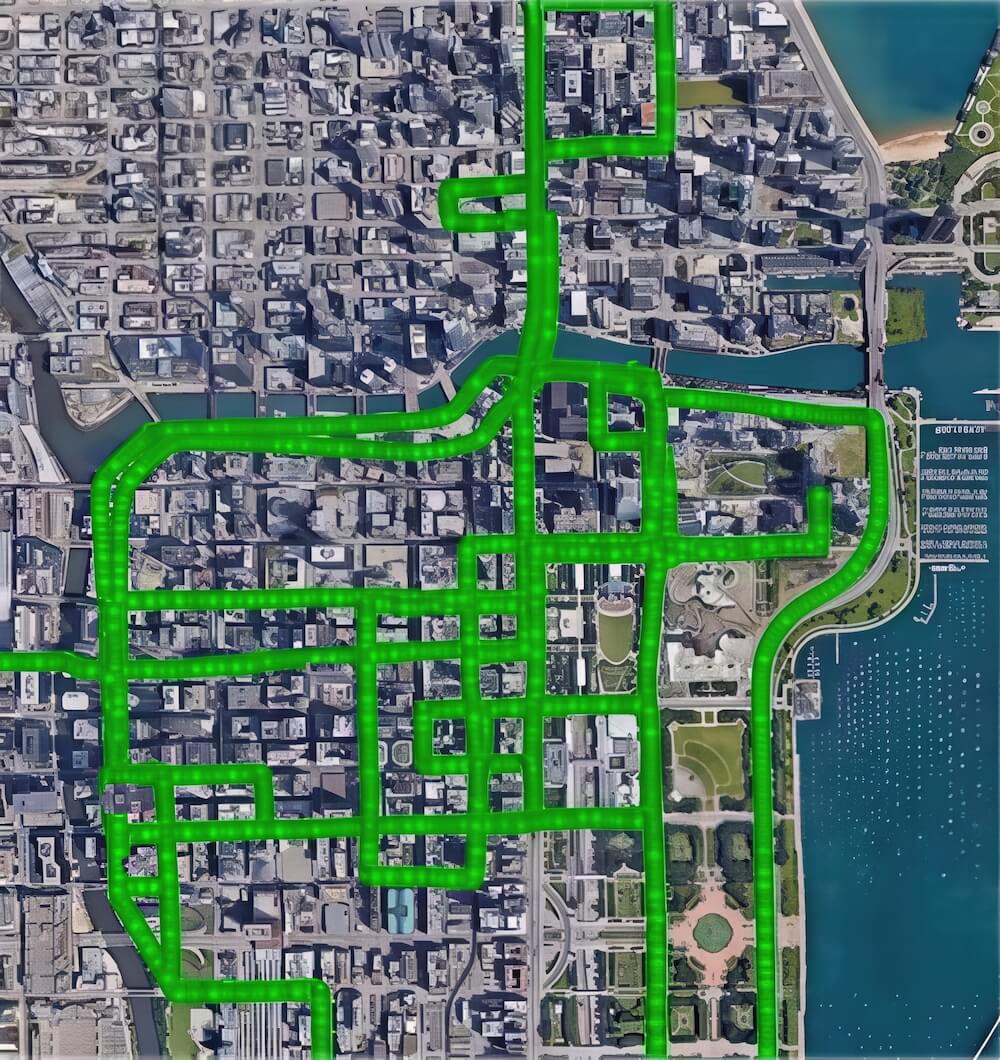
Mitigation of GNSS muiltipath in dense urban environments
- GNSS integrated with automotive-grade MEMS IMU
- Urban canyon drive test: downtown Chicago
Traditional approach (from a leading market product): Unreliable performance, position output crosses through buildings
QuGate: Maintains accurate positioning and keeps the vehicle on the road
Let's talk about partnership, deployment, or testing your use case.
